
专利详情
Patent Detail
| 专利类别:发明 | 申请号: CN201410853366.3 | 申请日期:2014-12-30 |
| 公开日期:2018-11-20 | 专利名称: 一种多机器人系统的控制方法及多机器人系统 | 发明人:秦召红,王凌霄,张敏,杨望仙,刘冬 |
| 法律状态:授权 | 申请人:中国科学院深圳先进技术研究院 | 公开号:CN105807734B |
| 主分类号:G05B19/418(20060101) | 优先权号: | 行业分类:物理 |
| 优先权日: | 专利权人:中国科学院深圳先进技术研究院 |
专利附图
Patent Picture
摘 要
Summary
本发明适用于机器人技术领域,提供了一种多机器人系统的控制方法及多机器人系统,所述多机器人系统包括一台中央控制器和至少两台机器人,所述方法包括:第一机器人每隔预设时间向所述中央控制器和第二机器人发送心跳包,所述第二机器人为所述系统中除所述第一机器人之外的机器人;监控所述中央控制器和所述第二机器人对心跳包的接收情况;根据监控结果对所述系统中的机器人进行任务调度。本发明基于心跳包发送机制,通过设置中央控制器,来对配置于同一局域网内的多机器人进行任务的整体调度,从而实现多机器人系统的容错控制,避免了因机器人故障导致的任务执行失败以及避免了任务的重复执行。
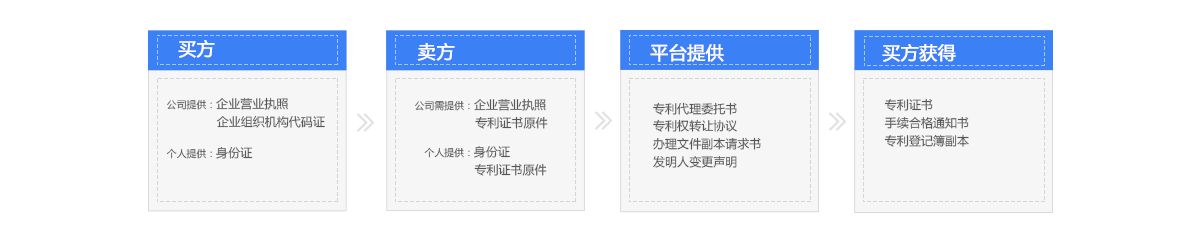
交易流程
Transaction Process

过户资料
Transfer Information
具体描述
Specific Description