
专利详情
Patent Detail
| 专利类别:发明 | 申请号: CN201210275302.0 | 申请日期:2012-08-03 |
| 公开日期:2014-02-12 | 专利名称: 多巡逻机器人的调度方法和系统 | 发明人:陈会娟,朱定局 |
| 法律状态:授权 | 申请人:中国科学院深圳先进技术研究院 | 公开号:CN103576683A |
| 主分类号:G05D1/02(20060101) | 优先权号: | 行业分类:物理 |
| 优先权日: | 专利权人:中国科学院深圳先进技术研究院 |
专利附图
Patent Picture
摘 要
Summary
本发明涉及一种多巡逻机器人的调度方法和系统,用于多巡逻机器人管理调度系统,主要包括建立基于目标区域的地图数据、三维数据以及属性数据的空间数据库;建立巡逻机器人数据库和敏感信息数据库;在目标区域部署巡逻机器人;对巡逻机器人进行全局路径规划;巡逻机器人对目标区域进行监测是否发生突发事件;根据监测到的突发事件,巡逻机器人发送报警信号至控制室;最终,根据报警信号,对巡逻机器人进行合理调度,并在三维GIS系统中发布。本发明的基于三维GIS的调度方法,实现对巡逻机器人多角度、全方位、立体化的管理与调度,最终实现实时、动态对目标区域进行有效、及时的监控。
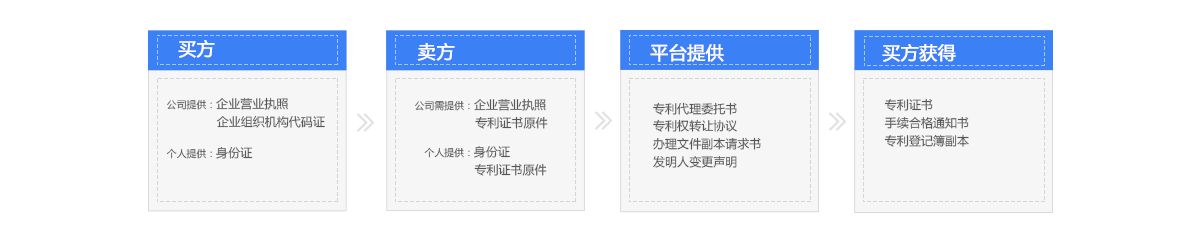
交易流程
Transaction Process

过户资料
Transfer Information
具体描述
Specific Description