
专利详情
Patent Detail
| 专利类别:发明 | 申请号: CN201610341151.2 | 申请日期:2016-05-20 |
| 公开日期:2018-06-26 | 专利名称: 一种基于四连杆机构的外骨骼机器人肩关节设计方法 | 发明人:杨祎航,潘华 |
| 法律状态:授权 | 申请人:深圳市君航智远科技有限公司 | 公开号:CN105818136B |
| 主分类号:B25J9/00(20060101) | 优先权号: | 行业分类:作业;运输 |
| 优先权日: | 专利权人:深圳市君航智远科技有限公司 |
专利附图
Patent Picture
摘 要
Summary
本发明提出了一种使用四连杆机构设计肩关节的方法:记录双臂自然下垂时肩关节位置,标记肱骨C1B1;双臂伸直自然外展至肱骨位于水平方向,记录肩关节新的位置相对于上一步中肩关节位置的偏移量,标记肱骨C2B2;作图求解所述四连杆机构,将C1B1上端延长至点X1作为四连杆机构的第一个铰接点;在C1B1上另选一点Y1作为四连杆机构的第二个铰接点;在肱骨C2B2上找到对应的两点X2、Y2;以X1、X2为两个端点作一段圆弧X1X2,其圆心位于点V,以Y1、Y2为两个端点作另一段圆弧Y1Y2,其圆心位于点U,则U与V为四连杆机构的另外两个铰接点;作线段UV,线段UV代表四连杆机构的机架。本发明实现了不需要增加电机、减速装置等额外动力部件即可支持肩关节与锁骨联动的运动形式。
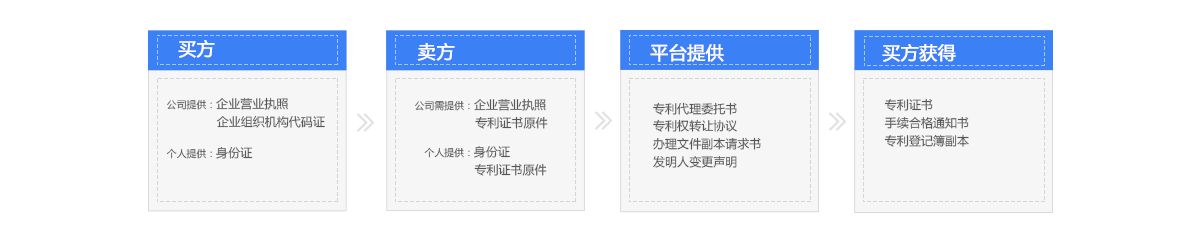
交易流程
Transaction Process

过户资料
Transfer Information
具体描述
Specific Description