
专利详情
Patent Detail
| 专利类别:发明 | 申请号: CN201610344429.1 | 申请日期:2016-05-20 |
| 公开日期:2018-04-10 | 专利名称: 一种解决外骨骼机器人肩关节奇异位形问题的方法及装置 | 发明人:杨祎航,潘华 |
| 法律状态:授权 | 申请人:深圳市君航智远科技有限公司 | 公开号:CN105856199B |
| 主分类号:B25J9/00(20060101) | 优先权号: | 行业分类:作业;运输 |
| 优先权日: | 专利权人:深圳市君航智远科技有限公司 |
专利附图
Patent Picture
摘 要
Summary
本发明提出了一种解决外骨骼机器人肩关节奇异位形问题的方法,首先在肘关节处增设肘套与力传感器的方式来检测肢体的运动意图,外骨骼肱骨后段构件由一根杆件与一个环形轴承内环构成,在该轴承内环的内壁加装一个与其同心的肘套,并在环形轴承与肘套二者之间等距安装四个压力传感器用于检测来自任意方向的正压力;传感器测量两组正交分力值的大小以求解出合力矢量<I>f</I>的大小与方向;驱动电机A,通过控制外骨骼肩关节L型摇臂带动外骨骼肱骨前段转动到与力<I>f</I>的方向垂直的位置,同时,电机C与电机A同步反向转动,以保持外骨骼肱骨后段的姿态不变;随着电机B驱动外骨骼肱骨前段转动,电机C轴线不再与电机A的轴线重合,肩关节不再处于奇异位形。
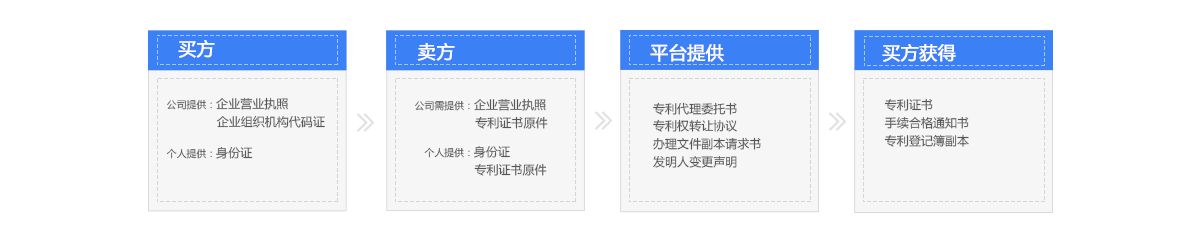
交易流程
Transaction Process

过户资料
Transfer Information
具体描述
Specific Description